
 müller+krahmer GmbH
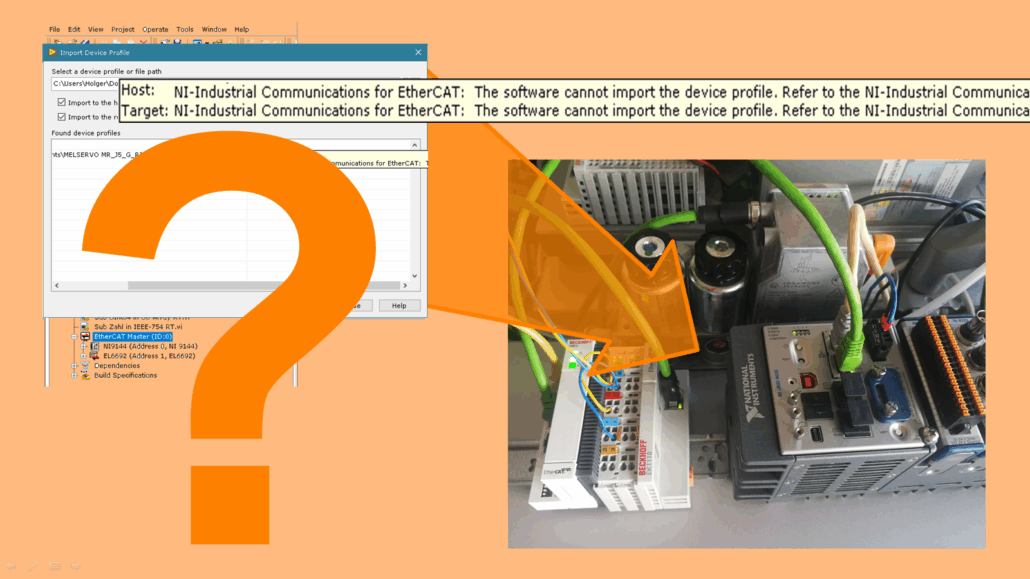
müller+krahmer GmbHWas tun, wenn sich der EtherCAT-Slave nicht an den compactRIO-Master anschließen läßt?
Mit Industrial Communications for EtherCAT und dem damit verfügbaren EtherCAT-Master hat NI für sein PAC-Familie compactRIO eine leistungsfähige Schnittstelle für die Einbindung in industrielle Umgebungen geschaffen und gleichzeitig mit EtherCAT den aus unserer Sicht leistungsfähigsten und flexibelsten Real-Time-Ethernet-Bus gewählt. Ein weites Spektrum an Sensoren und Aktoren läßt sich damit an alle cRIO-Controller anschließen, die über die notwendige zweite Ethernet-Schnittstelle verfügen.
Dennoch gibt es hie und da den Fall, daß einzelne, zumeist recht komplexe Slaves sich nicht an den Master anschließen lassen, weil sich offensichtlich die zugrundeliegenden Standards unterscheiden. Unsere Lösung: wir verbinden den EtherCAT-Master des cRIOs mit einem zweiten Master, der mit dem Slave kommunizieren kann – entweder über eine Master-Master-Kopplung mittels EtherCAT-Bridge oder mit einem programmierbaren Slave, der seinerseits einen EtherCAT-Master zur Verfügung stellt. Der höhere Aufwand für die zusätzliche Hardware und deren Programmierung wird häufig durch eine einfachere Konfiguration des neuen EtherCAT-Strangs und durch die vereinfachte Umsetzung spezieller Mechanismen, wie zyklische SDO-Kommunikation, File-over-EtherCAT (FoE) oder Ethernet-over-EtherCAT (EoE) kompensiert.
KONTAKT:
Holger Müller
E-Mail: mueller@mueller-krahmer.de
Mobil: 0160 / 287 7294