
 müller+krahmer GmbH
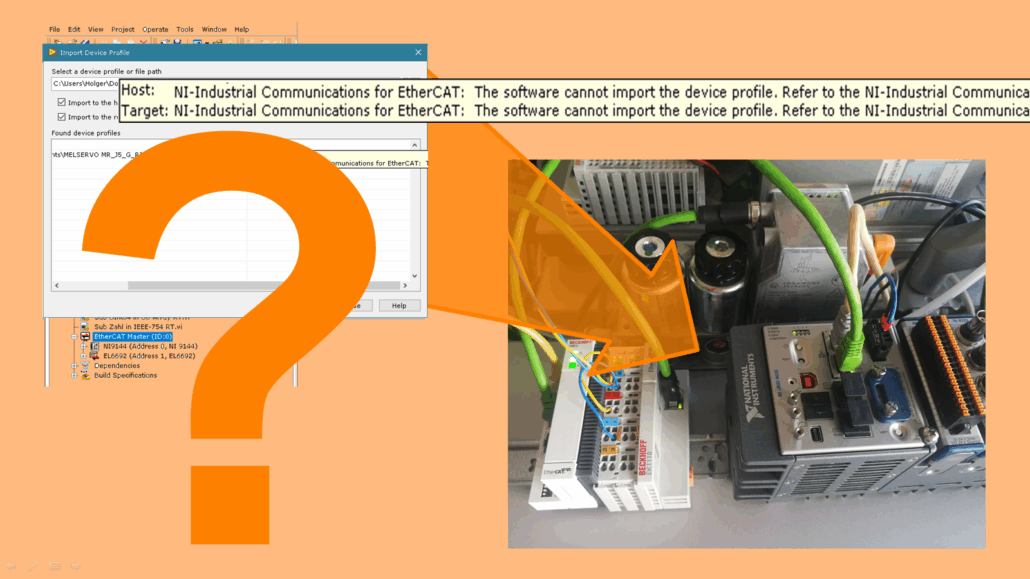
müller+krahmer GmbHWhat to do if the EtherCAT slave cannot be connected to the compactRIO master?
With Industrial Communications for EtherCAT and the EtherCAT master available with it, NI has created a powerful interface for integration into industrial environments for its compactRIO PAC family and, with EtherCAT, NI has chosen what we consider to be the most powerful and flexible Real-Time Ethernet bus. A wide range of sensors and actuators can be connected to all cRIO controllers that have the necessary second Ethernet interface.
Nevertheless, it occassional happens that certain slaves cannot be connected to the master because the respective standards obviously differ. Our solution: we connect the EtherCAT master of the cRIO to a second master that can communicate with the slave – either via a master-master connection using an EtherCAT bridge or with a programmable slave, which in turn provides an EtherCAT master. The higher cost of the additional hardware and its programming is often compensated for by a simpler configuration of the new EtherCAT branch and the simplified implementation of special mechanisms such as cyclic SDO communication, File-over-EtherCAT (FoE) or Ethernet-over-EtherCAT (EoE).
CONTACT:
Holger Mueller
Email: mueller@mueller-krahmer.de
Mobile: +49 160 / 287 7294