
 müller+krahmer GmbH
müller+krahmer GmbHLabVIEW and EtherCAT – not only on the cRIO platform
When considering the combination of LabVIEW and EtherCAT, most users will probably think of the EtherCAT master on the compactRIO controllers, which is used to connect slave chassis. We also use this option when it comes to acquiring large quantities of signals. At the same time, however, the cRIO EtherCAT interface also offers the option of integrating other masters via an EtherCAT bridge as well as other slaves, such as sensors and actuators. In conjunction with programmable slaves, the EtherCAT interface ultimately enables the cRIO platform to be expanded to include buses for which there are no standard C-Series modules (anymore), such as Profinet or IO-Link.
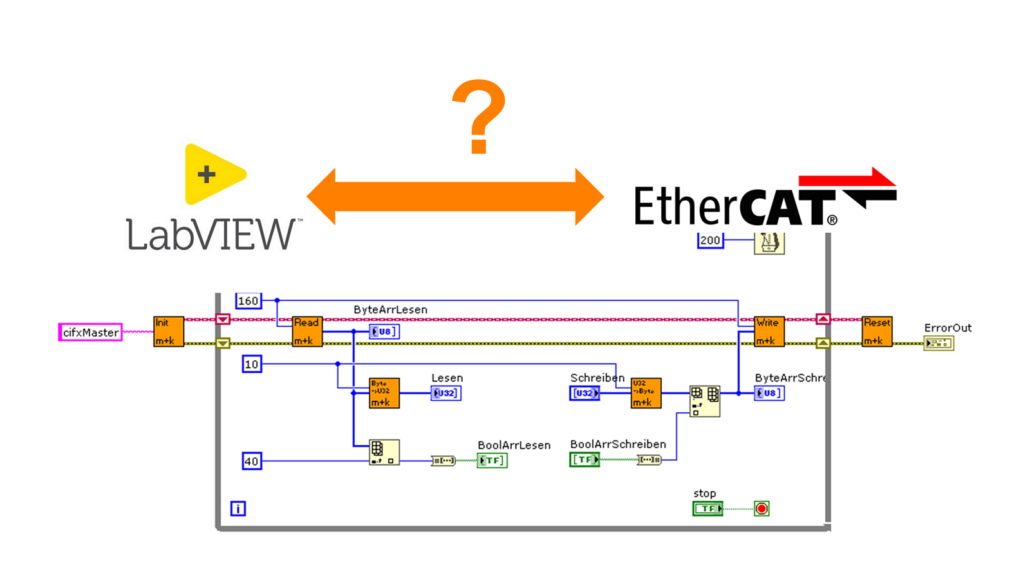
Bus communication is not only an issue for real-time controllers, but also for numerous PC applications. After all, in many cases, the aim is to make data from PLCs and other bus-based systems available for analysis or monitoring. Instead of high-precision timing, the focus here is on flexibility and ease of use of the interface. This is provided by our LabVIEW library for the real-time Ethernet boards of Hilscher’s cifX family. Unlike cRIO, the LabVIEW side can be either master or slave. And for very specific requirements, such as communication via Ethernet over EtherCAT (EoE) or a program-controlled bus scan, we also have suitable solutions.
CONTACT:
Holger Mueller
Email: mueller@mueller-krahmer.de
Mobile: +49 160 / 287 7294